Beaver: This is a tool for computing the over-approximate reach set of the parameterized linear dynamical system given by,
Reach set: The state of the System (1) starting from an initial state x(0) ∈ X0 for a matrix A ∈ Ω at time t is given by the state transition function defined as:
Verification: This tool is useful for safety verification of the reach set of the parameterized linear dynamical system from the given unsafe region. It is shown in below figure.
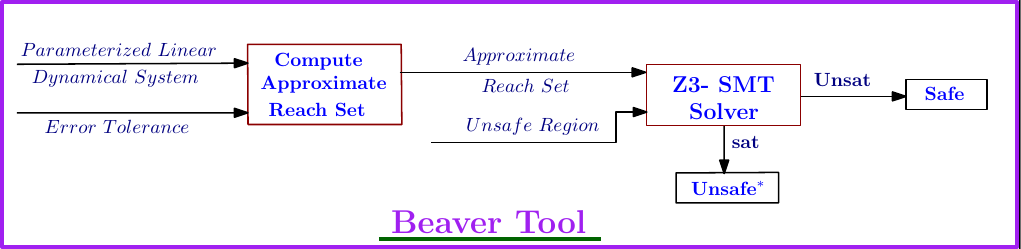 In the above figure, if the Z3-SMT solver gives the output unsat, the ReachΦ
(X(0), Ω, [0,T]) does not intersect with unsafe region, i.e. it is safe and if
the output is sat, the ε-ball of reach set Bε
(ReachΦ(X(0), Ω, [0,T])) intersects with the unsafe region i.e. it is
Unsafe*. The Unsafe* guarantees that the reach set of the parameterized linear
dynamical system is unsafe within the error tolerance ε > 0.
In the above figure, if the Z3-SMT solver gives the output unsat, the ReachΦ
(X(0), Ω, [0,T]) does not intersect with unsafe region, i.e. it is safe and if
the output is sat, the ε-ball of reach set Bε
(ReachΦ(X(0), Ω, [0,T])) intersects with the unsafe region i.e. it is
Unsafe*. The Unsafe* guarantees that the reach set of the parameterized linear
dynamical system is unsafe within the error tolerance ε > 0.